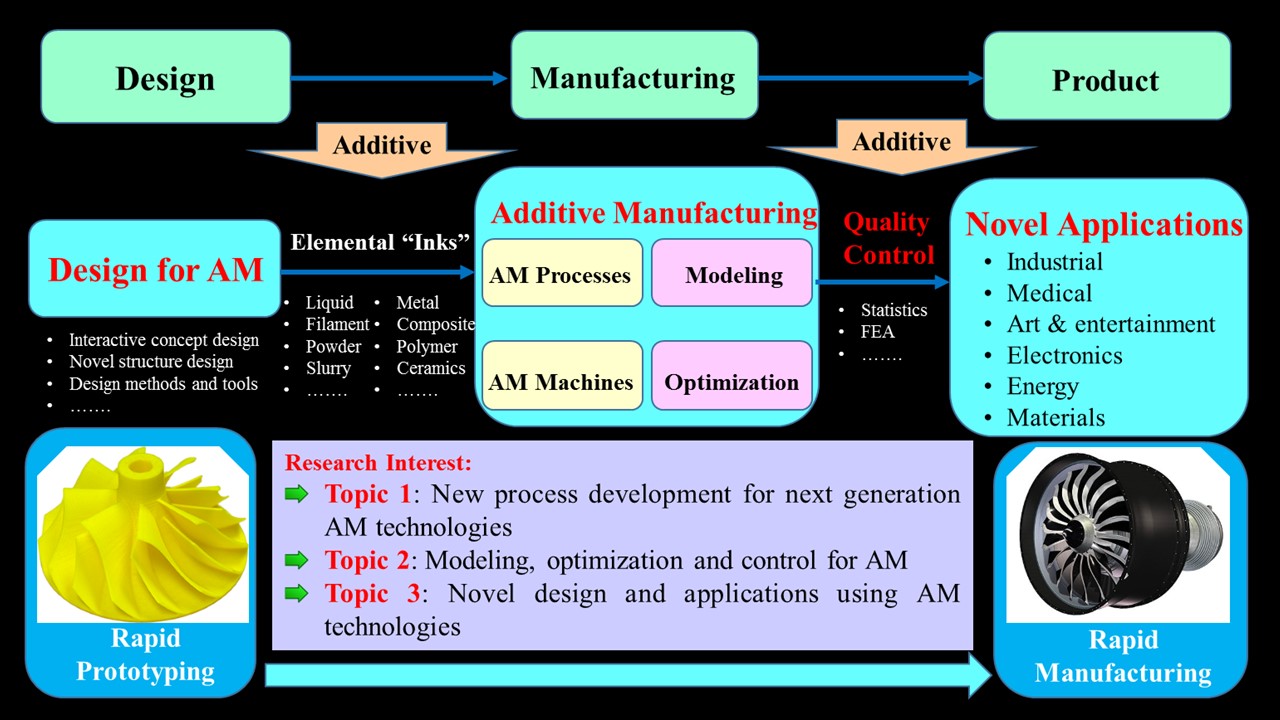
Big Picture
Selected Projects
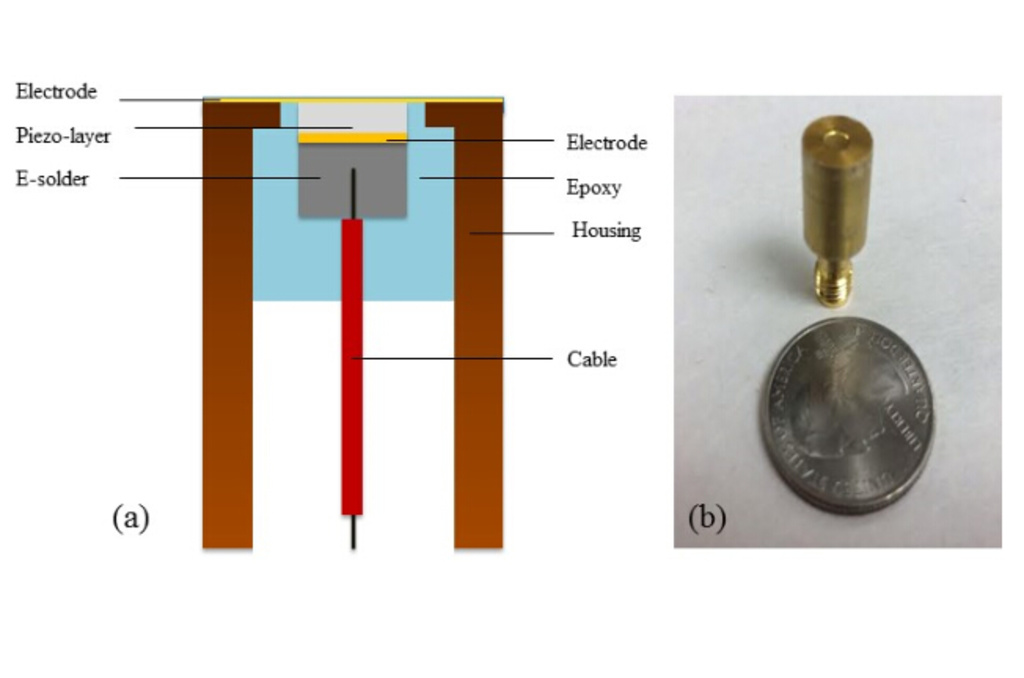
Piezoelectric Device Fabrication Using Digital Projection based Additive Manufacturing
Piezoelectric Device Fabrication Using Digital Projection based Additive Manufacturing
|
|
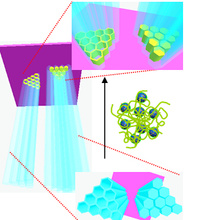
Polymer based Composite Fabrication Using Digital Projection based Additive Manufacturing
Polymer based Composite Fabrication Using Digital Projection based Additive Manufacturing
|
|
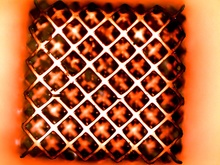
Micro-Scale Fabrication over Large Areas Using Digital Projection based Additive Manufacturing
Micro-Scale Fabrication over Large Areas Using Digital Projection based Additive Manufacturing
|
|
Multi-Directional Additive Manufacturing based on Fused Deposition Modeling Process
Multi-Directional Additive Manufacturing based on Fused Deposition Modeling Process
|

|
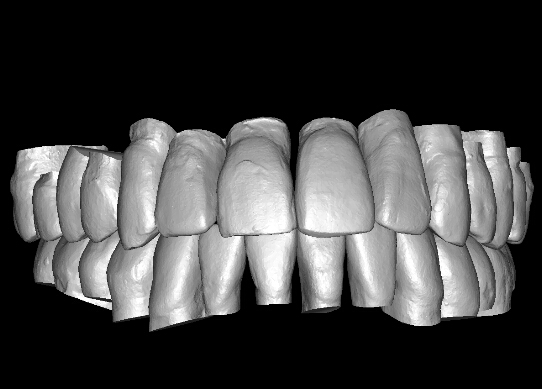
Shape Memory Wire Design for Affordably Priced High-Tech Teeth Braces
Shape Memory Wire Design for Affordably Priced High-Tech Teeth Braces
|
|
Acknowledgments
We would like to acknowledge and sincerely thank our sponsors for their generous support of our research!